STM32-Quadcopter Documentation
Overview
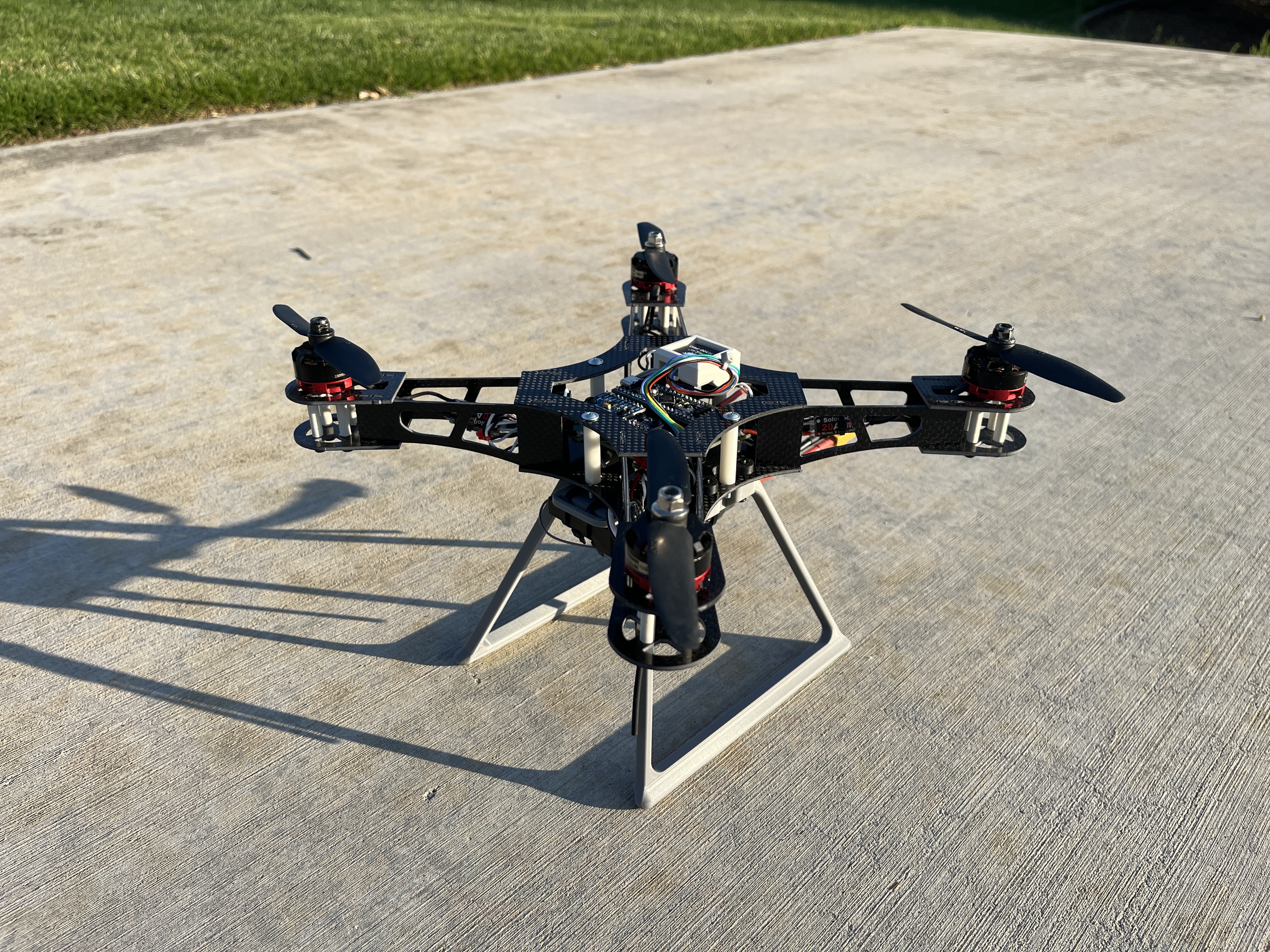
The STM32-Quadcopter is powered by an STM32F411CEU6 Blackpill microcontroller running INAV 6.0 firmware. The system integrates an MPU6500 IMU for motion sensing and a BMP280 barometer for altitude. Optional GPS and magnetometer modules enhance navigation and flight stability.
This documentation provides some necessary guidance for hardware, electronics, and firmware setup.
To get started quickly, visit the following project resources:
- GitHub Repository: I-M-Robotics-Lab/STM32-Quadcopter — Contains firmware targets, CAD models, PCB/schematics.
- MakerWorld Page: 3D Printable Frame Models — Ready-to-print and CNC-cut parts with print profiles.
- Community Discord: I-M Robotics Lab Server — Ask questions, share builds, and collaborate with contributors.